Benefits
Events
Products & Programs

Author:
Hannah Darling
Graduate Research Assistant, University of Massachusetts Amherst
As computational fluid dynamics (CFD) enthusiasts, we must sometimes take opportunities to toot our own horns when it comes to the vast capabilities of high-fidelity modeling techniques. One great opportunity appears in the floating offshore wind (OSW) industry.
Floating OSW has experienced significant growth recently and will be a key player in the global clean energy transition. Floating systems are becoming particularly favorable as they offer many advantages to their fixed-bottom or onshore counterparts. Most notably, they enable access to deeper waters with more space and higher wind potential. Floating OSW also minimizes concerns for visual, noise, and environmental impacts that on/near-shore turbines face.
Currently, there are only three operational floating OSW farms in the world—Hywind Scotland, Kincardine, and Windfloat Atlantic—but there are several others in the construction or planning phases, and many countries are making major research and development strides to further advance this technology.1
In the United States, the Floating Offshore Wind Shot outlines two key targets: to reach 15 GW of installed floating OSW capacity and to reduce the levelized cost of energy by 70%, both by 2035. According to this initiative, the U.S. has a “critical window of opportunity” to bring down technology costs and become a world leader in floating OSW design, deployment, and manufacturing. The industry will also provide significant economic benefits by producing thousands of jobs in wind manufacturing, installation, and operations, especially in coastal communities.2
However, as with many upcoming renewable technologies, there is still much work to be done to optimize the design and implementation of floating offshore wind turbines (FOWTs) to reduce life cycle costs and maximize performance before they can become widespread. One engineering solution is to use innovative modeling techniques to simulate and predict the performance of these FOWT systems prior to full-scale implementation.
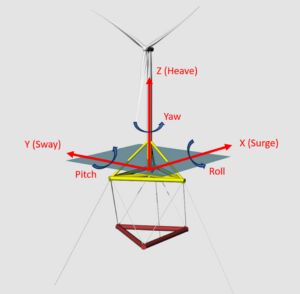
Floating OSW systems are fairly complex, consisting of a wind turbine, a floating support platform, and mooring lines anchoring it to the sea floor. Unlike fixed-bottom platforms, FOWTs face six degrees of freedom (DOF) of motion (shown in Figure 1), meaning they can translate and rotate about all three axes. Such a range of freedom, along with the varying wind and wave conditions experienced by these systems, makes load, performance, and dynamic responses difficult to predict.3 These systems also experience a type of “coupling”, where the wind loading on the turbine and wave loading on the platform affect each other. Then, when the mooring system is considered, the analysis of the overall FOWT system is complicated even further!4 To address these dynamic response challenges and better predict the behavior of these systems, there has been an increasing focus on the improvement of FOWT modeling—in particular, numerical modeling—techniques.
While FOWT designers use a wide range of numerical models to verify and predict the performance of their designs, “high-fidelity” tools like CFD are especially useful as they are capable of modeling the complex fluid-structure interactions (FSI) between the water, air, turbine, and platform (among many other benefits). CFD therefore enables researchers to perform full-scale, direct modeling of FOWT systems without the presence of scale effects (faced by physical models) or over-simplified modeling techniques (of lower-fidelity models).4
Over the past year, I have been working as a graduate research assistant in Dr. David Schmidt’s Multi-Phase Flow Simulation Laboratory at the University of Massachusetts Amherst. In collaboration with Dr. Shengbai Xie and Dr. Jasim Sadique of Convergent Science, we have been simulating a FOWT platform using CONVERGE CFD software.
In our work, we simulate the Stiesdal TetraSpar FOWT platform5 under various environmental load conditions defined by Phase IV of the OC6 (Offshore Code Comparison Collaboration, Continued with Correlation and unCertainty) project. This project addresses a need for FOWT model verification and validation via a three-sided comparison between engineering-level, high-fidelity CFD, and experimental results. The experimental results used in the OC6 project were collected at the University of Maine on a 1:43 scale model of the TetraSpar platform2 and was the basis of our CFD comparison.
The CFD model of this FOWT system includes the platform and the moorings but excludes simulation of the wind turbine for simplicity, as Phase IV of OC6 focuses only on the hydrodynamic challenges associated with this system.2 The mooring configuration consists of three chain catenary (free-hanging) lines with fixed anchor locations, as well as a “sensor umbilical”. The sensor umbilical was a required addition in the physical model to house the sensor cables, so it was also included in the CFD model for effective comparison.
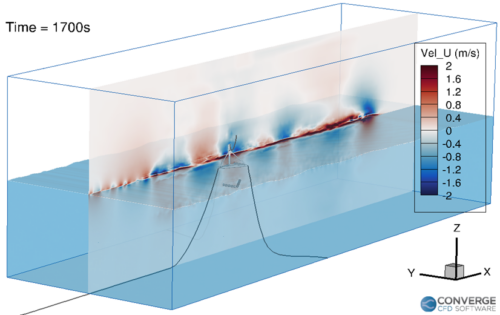
The computational domain (Figure 2) is modeled as a box in which waves are introduced at the inlet boundary, and relaxation zones exist at the inlet and outlet to gradually enforce these waves to a given condition: theoretical wave conditions at the inlet and calm water conditions at the outlet.6 The volume of fluid (VOF) method simulates the multi-phase (air/water) flow, and the moorings are dynamic lumped-mass segments including seabed interaction effects. The cut-cell Cartesian mesh models the 6 DOF FSI.
To understand the influence of model setup on the simulation results, we tested various computational cell sizes, turbulence models, and numerical schemes, and compared the results with the UMaine experimental data. In this comparison, we focused mainly on the 6 DOF of platform motion. An example is shown below in Figure 3 for a regular wave-only load case (Load Case 4.1 in OC6 Phase IV) with a wave height of 8.31 meters and a wave period of 12.41 seconds.
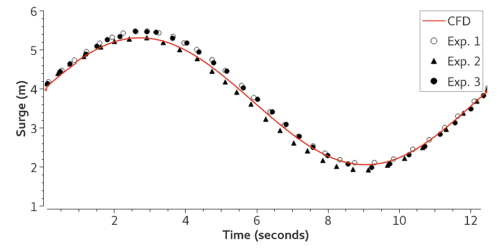
Sets of simulations were used to investigate the best practices for simulation design and grid requirements. The results for our final cases show a good match between the CFD results and the measured data, and we are continuing to work on further CFD studies. For more information, check out the OC6 Phase IV CFD publication!
As the floating OSW industry grows, engineers will continue to rely on modeling techniques to simulate and predict the performance of FOWT systems. In particular, high-fidelity CFD methods are the most reliable as they have an unmatched capacity for predicting and analyzing complex FOWT behaviors under realistic conditions. Therefore, the improvement and validation of these CFD tools will continue to be a major focus of research in the future.
CFD methods play a critical role in optimizing and reducing the costs of FOWT systems to make them economically competitive with their well-established fixed-bottom offshore and onshore cousins. This will be a key step in advancing this technology, reaching the United States’ Floating Offshore Wind Shot goals, and providing clean, reliable, and affordable power for millions of people.
[1] Otter A, Murphy J, Pakrashi V, Robertson A, Desmond C. A review of modelling techniques for floating offshore wind turbines. Wind Energy. 2022;25(5):831-857. doi:10.1002/we.2701
[2] Office of Energy Efficiency & Renewable Energy, “Floating Offshore Wind Shot.” Energy.Gov, Sept. 2022, www.energy.gov/eere/wind/floating-offshore-wind-shot.
[3] Matha D, Schlipf M, Cordle A, Pereira R, Jonkman J. Challenges in Simulation of Aerodynamics, Hydrodynamics, and Mooring-Line Dynamics of Floating Offshore Wind Turbines. NREL/CP-5000-50544, October 2011.
[4] Liu Y, Xiao Q, Incecik A, Peyrard C, Wan D. Establishing a fully coupled CFD analysis tool for floating offshore wind turbines. Renewable Energy. 2017;112:280-301. doi:10.1016/j.renene.2017.04.052
[5] 2021, The TetraSpar full-scale demonstration project, www.stiesdal.com
[6] Johlas, Hannah, 2021: Simulating the Effects of Floating Platforms, Tilted Rotors, and Breaking Waves for Offshore Wind Turbines, Doctoral Dissertations. 2345.







