Benefits
Events
Products & Programs


Author:
Julian Toumey
Senior Research Engineer
One of CONVERGE’s strengths has always been providing accurate results for complex transient problems with moving geometry. With the introduction of new features in CONVERGE v2.4, this strength extends to steady-state problems.
Two new features in CONVERGE v2.4 that accelerate your steady-state simulations are the completely redesigned steady-state solver and the new multiple reference frame (MRF) approach. These new features work particularly well together when applied to problems with moving geometry but for which you expect a steady-state result. Some examples of such problems are dynamic compressors, fans, and pumps.
The new steady-state solver in CONVERGE v2.4 leverages the steady-state monitor to track the convergence of flow quantities. The simulation begins with an automatically coarsened grid and loose solution tolerances for the governing equations, which allows fluid flow to rapidly propagate through the domain. CONVERGE progressively refines the grid and tightens solution tolerances to improve the solution accuracy as each monitored flow variable falls within a specified mean and standard deviation.
For simulations of devices with moving geometry (e.g., compressors/fans/pumps), the MRF approach reduces computational time with a very small impact on accuracy. The crux of this approach is to treat the moving portion of the geometry (e.g., the impeller for a pump) as a separate reference frame. CONVERGE transforms the flow quantities from the inertial frame to the moving frame to represent the geometry movement.
Figure 1. The fan geometry.
The centrifugal fan example case below compares several approaches to accelerating simulations in which we expect a steady-state result. This case is the ERCOFTAC centrifugal fan with vaned diffuser (Figure 1 below shows the fan geometry). The results shown below in Figures 2 and 3 compare mass flow rate at the outlet for three cases: steady-state solver with the MRF approach, transient solver with the MRF approach, and transient solver with moving geometry.
For mass flow initial conditions, the two MRF cases use a uniform value throughout the entire domain. The moving geometry case, however, employs a more accurate initial condition obtained from prior simulations on a coarse grid. Despite this more accurate initial condition, the moving geometry case takes several thousand more cycles to converge to an accurate steady-state.
Note that the two cases that employ the new v2.4 MRF approach converge much faster than the case that includes moving geometry. Furthermore, the case that uses the MRF approach and the steady-state solver converges the fastest of the three cases, and it takes fewer than 1,000 cycles. Figure 4 below compares the wall clock times for these solver configurations.
All three cases are within 3% of experimental results for mass flow rate and pressure rise.
Figure 2. Outlet mass flow rate convergence history.
When the simulation will yield a steady-state result, the MRF approach combined with the steady-state solver in CONVERGE v2.4 will rapidly obtain accurate results.
Figure 3. Outlet mass flow rate convergence history, zoomed.
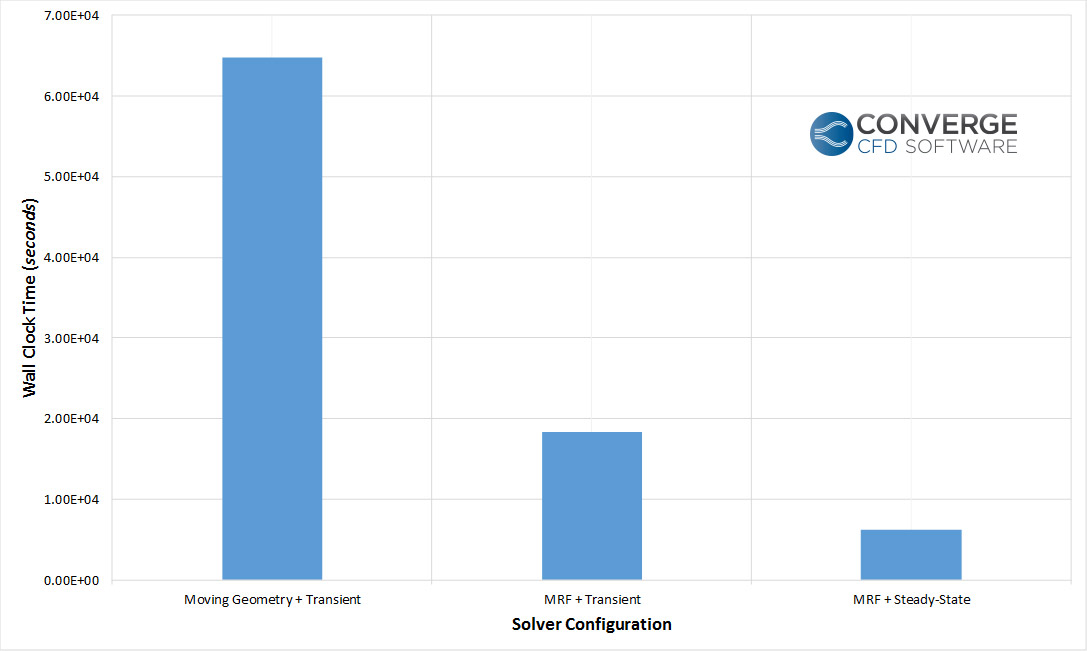
Figure 4. Comparison of wall clock time for various solver approaches.







