Benefits
Events
Products & Programs


Author:
Elizabeth Favreau
Marketing Writing Team Lead
From the Argonne National Laboratory + Convergent Science Blog Series
As the coronavirus vaccine continues to be administered around the world, you’ve likely heard about the challenges associated with distributing the vaccine to remote areas. You may not have heard, however, how a particular technology is aiding the distribution efforts: drones. Autonomous drones are able to reach remote areas that may not have reliable infrastructure and deliver hundreds of vaccine doses to hospitals or temporary mobile clinics. Drones will not be able to single-handedly solve the problem of vaccine accessibility, but they are already making a difference.

The medical field isn’t the only industry making use of drones—they are becoming increasingly common for defense, agriculture, construction, package delivery, photography, videography, and environmental applications. The drone market is expected to grow rapidly over the next decade as drones become integrated into more aspects of our lives. With a greater number of drones in the sky comes the need to ensure their safety and reliability.
Engineers in the Computational Multi-Physics Research Section at Argonne National Laboratory are putting their skills to use to develop computational fluid dynamics (CFD) models to help design capable drones.
“CFD is beneficial for designing drones, because we can obtain answers quickly,” said Dr. I-Han Liu, Postdoctoral Researcher at Argonne. “For example, we can predict the aerodynamic coefficients and quickly gather results for different flight conditions and different geometries, instead of conducting wind tunnel tests or actual flight tests, which can save a lot of costs and time in the design and development process.”
However, simulating drones is computationally intensive because of their large domains, moving geometries, and complex physics. The Argonne engineers took advantage of CONVERGE 3.0’s excellent load balancing and parallel scaling to run their drone simulations in a reasonable amount of time. To develop models that can be applied to a range of drones, Dr. Liu and Dr. Roberto Torelli, Research Scientist at Argonne, investigated two different types of drones: fixed-wing and multicopter.
The computational multi-physics group at Argonne has a long history of modeling automotive systems, particularly internal combustion engines and injection systems, but external aerodynamics was new territory. Before they jumped into modeling an entire drone, they simulated standardized airfoils known as NACA airfoils (from the name of the National Advisory Committee for Aeronautics, who developed and defined them). This activity ensured the team had a good understanding of the relevant physics. With that validation complete, they moved on to simulating a fixed-wing drone.
Dr. Liu and Dr. Torelli simulated the Pioneer RQ-2A drone, which was used for military operations in the 1980s and ‘90s, including reconnaissance, surveillance, target acquisition, and assessing battle damage. They chose this drone because there is a substantial amount of experimental data available to validate their numerical results. The Pioneer geometry is shown in Figure 1.
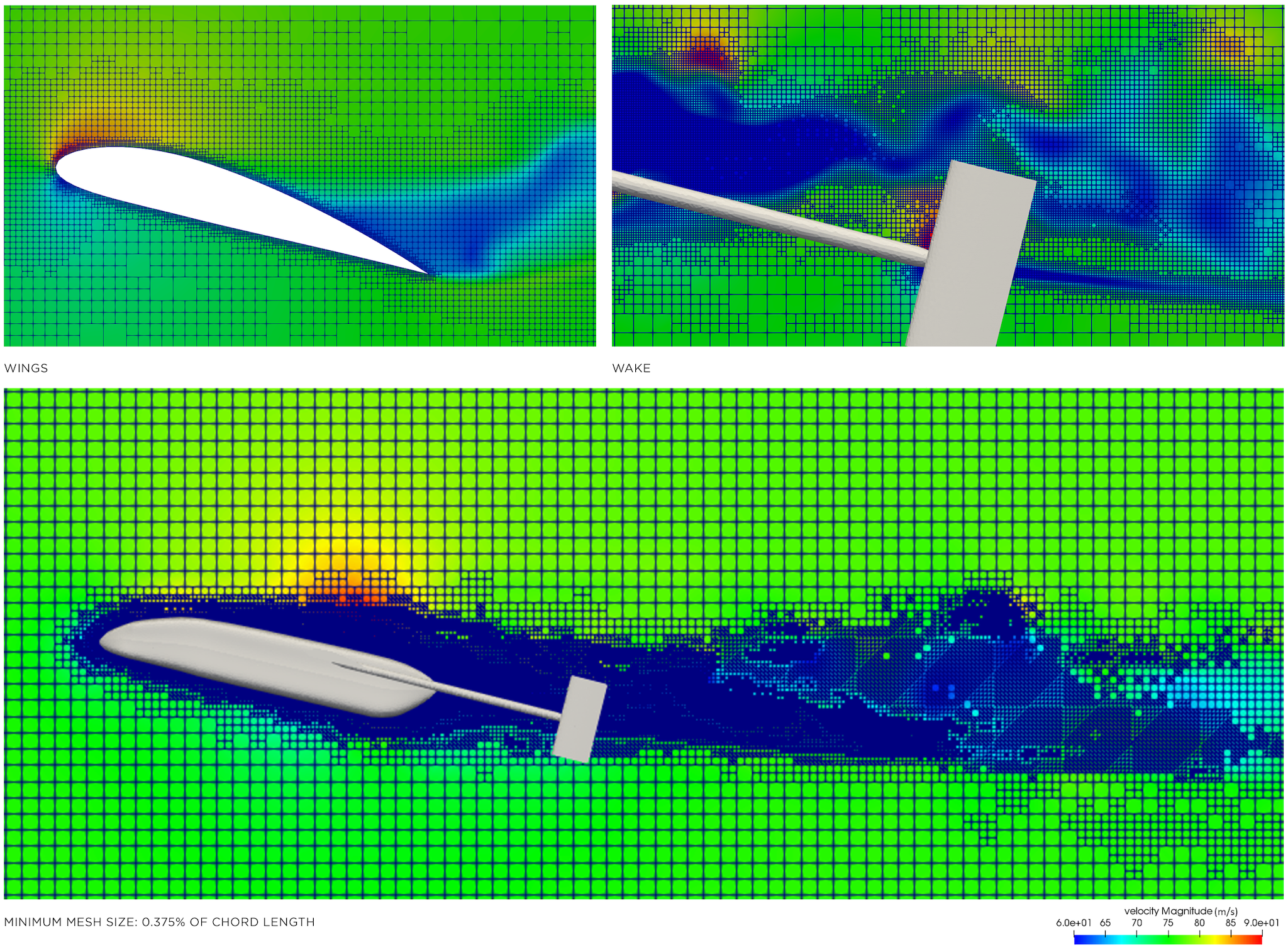
The Argonne engineers used incompressible, transient, unsteady Reynolds-Averaged Navier-Stokes (RANS) modeling to simulate the drone.1 As you can see in Figure 2, they applied fixed embedding to refine the mesh near the walls to accurately model the flow around the aircraft. In addition, they employed CONVERGE’s Adaptive Mesh Refinement (AMR) to dynamically refine the mesh in the wake region to capture gradients in the flow velocity.
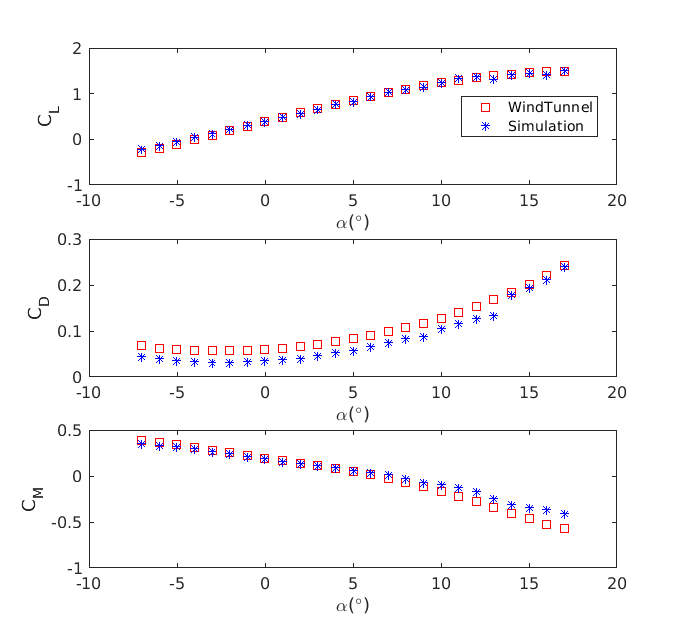
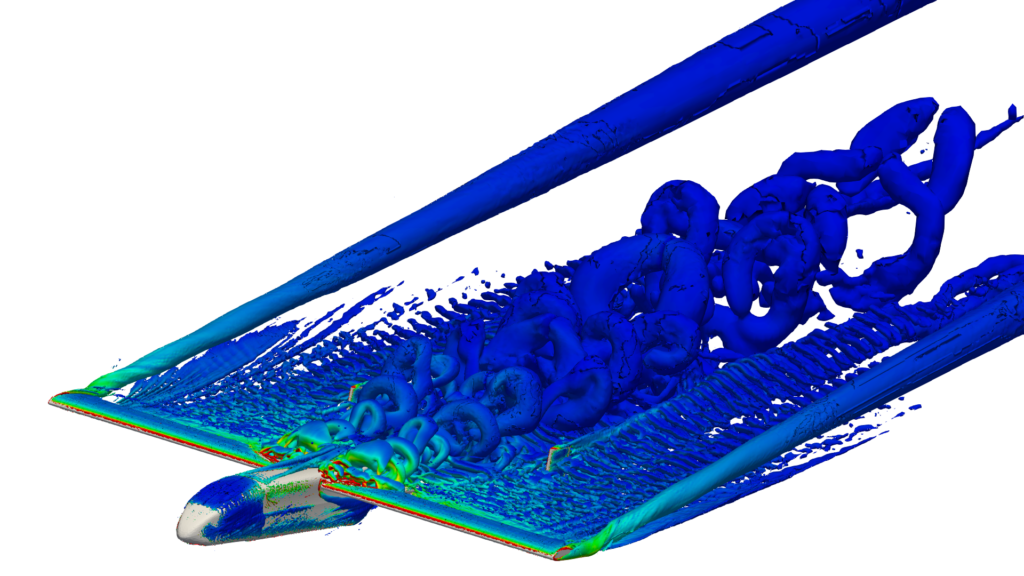
Dr. Liu and Dr. Torelli computed lift, drag, and moment coefficients to characterize the fixed-wing drone and compared the results to experimental wind tunnel data. As you can see in Figure 3, the results match quite well. The Argonne engineers also analyzed the vortex structures in the wake. At a 14-degree tilt angle, flow separation occurs, vortices originate from the wing tips, and vortex shedding is generated by the wing surfaces and the fuselage (Figure 4).
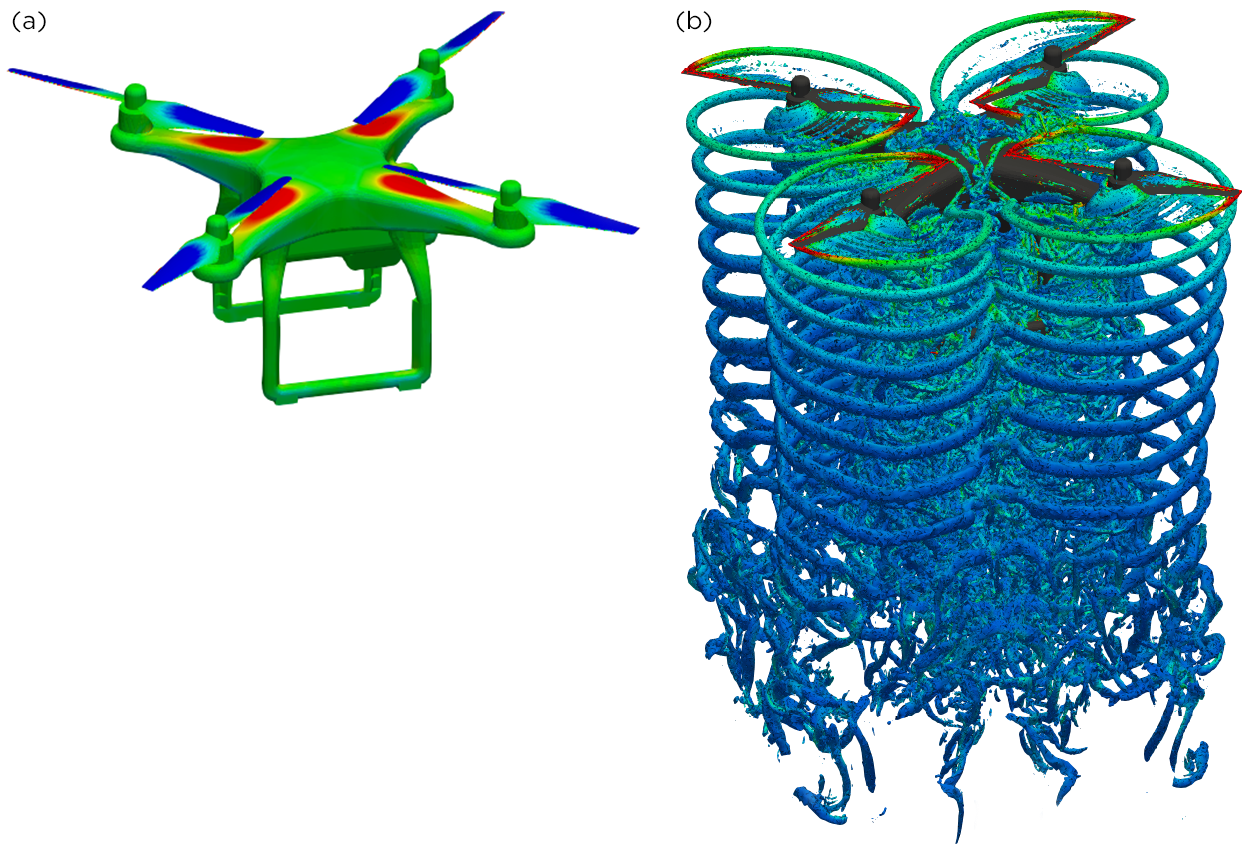
Following the fixed-wing drone studies, Dr. Liu and Dr. Torelli moved on to simulating a quadcopter, i.e., a multicopter with four propellers. They modeled the DJI Phantom 3 drone, which is a recreational quadcopter used for photography. You can see the geometry in Figure 5.

Multicopters pose an additional simulation challenge compared to fixed-wing drones. “If you think of a quadcopter, you have a series of spinning propellers that are moving at each time step and interacting with the computational grid,” said Dr. Torelli. “This complicates how we handle the solution of the flow field because you need to account for the propellers moving into a new computational domain. CONVERGE allowed us to tackle this problem with its cut-cell approach, in which the mesh is redefined at every time step by calculating the intersections of the base grid with the geometry.”
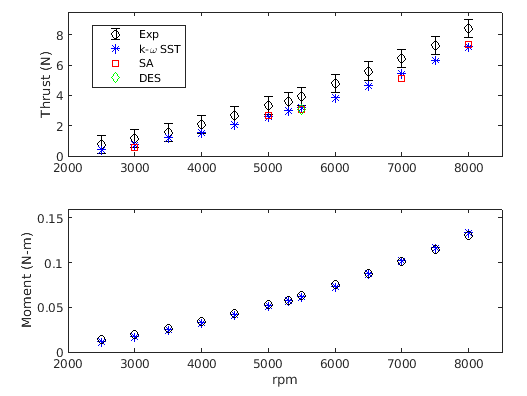
To start with, Dr. Liu and Dr. Torelli simulated a single quadcopter propeller.2 They tested three different turbulence models: k-ω shear stress transport (SST), Spalart-Allmaras (SA), and a detached eddy simulation (DES) model. To model the near-wall boundary flow, they embedded a fine mesh around the propeller, and they used AMR to capture the vortex structures in the wake.
With this method, Dr. Liu and Dr. Torelli calculated both the thrust force and moment versus the propeller rotation speed. As you can see in Figure 6, the trends for both parameters matched well with available experimental data.
Next, the Argonne engineers simulated the entire quadcopter geometry, using a DES turbulence model, fixed-mesh embedding, and AMR2. They calculated the pressure coefficient on the surface of the drone, and looked at the Q-criterion to visualize the vortex structures in the wake. Figure 7(a) shows high-pressure regions that were observed when the propeller tips rotated over the surface of the quadcopter. In Figure 7(b), you can see the helix vortex ropes that are generated by the propeller tips as the propellers rotate.
The results obtained via CFD can be incorporated into vehicle system simulations to investigate questions like how the drone will interact with the environment, whether a given drone will be able to accomplish its mission with its onboard battery, or if a certain drone can complete a new task assigned to it mid-mission. This cross-platform integration is what the Argonne engineers have planned for the future.
“The next step for my research will be trying to connect the CFD simulations with the dynamic system team to further help design the drones,” said Dr. Liu. “My CFD simulations can map data across different ranges, like different flying speeds or tilted angles, and provide them with comprehensive, accurate data they can use to design the control system.”
This research will help not only to create more efficient vehicles, but also to ensure that future drones will be able to complete their often critical missions, like delivering vaccines to communities in need.
In case you missed the other posts in this series, you can find them here:
[1] Liu, I.-H., Torelli, R., Prabhakar, N., and Karbowski, D., “CFD Modeling of Unmanned Aerial Systems With Cut-Cell Grids and Adaptive Mesh Refinement,” AIAA SciTech Forum and Exposition 2020, AIAA 2020-0538, Orlando, FL, United States, Jan 6–10, 2020. DOI: 10.2514/6.2020-0538
[2] Liu, I.-H. and Torelli, R., “Numerical Characterization of a Multi-Copter Using Moving Boundaries and Cut-Cell Grids,” 2021 AIAA Aviation Forum, Online, Aug 2–6, 2021. (accepted)







